Music Player Project
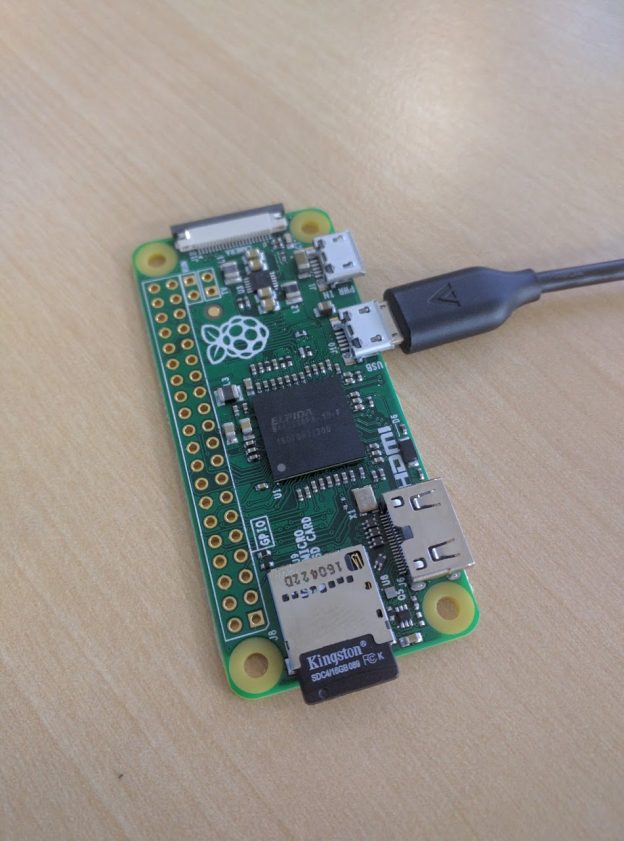
I’ve been looking at building an outdoor music player for a couple of weeks now. I am looking for something ‘rugged’ that I can take outside and dump on the grass at a picnic or BBQ, Battery operated (about 4-6 hours life), small display to show what is playing, couple…